
تجهیزات بازرسی فاضلاب فعلی که بر اساس دوربینهای CCD هستند، محدودیتها و مشکلاتی دارند چون کار با این تجهیزات مستلزمِ کشیدنِ آب از خطوط شبکه فاضلاب است. در این مقاله، یک ربات بازرسی فاضلاب اتوماتیک ارائه میشود که در آن از سنسورهای اولتراسونیک بهجای دوربینهای CCD استفادهشده است. بنابراین یکی از تجهیزات بازرسی فاضلاب، ربات بازرسی میتواند در لولههای پر از آب شبکه فاضلاب بدون نیاز به خالی کردن آب لولهها نیز کار کند. عملکرد آن توسط یک Embedded Systems کنترل میشود. این ربات میتواند موقعیتهای مسدود شده و نوع آن را تشخیص دهد. این دستگاه در آینده میتواند برای پاکسازی این محلهای مسدود شده ای نیز توسعه یابد.

ربات بازرسی لوله
بررسی مشکلات در شبکههای جمعآوری فاضلاب شهری
شبکه فاضلاب در همهجا گسترده است. خطوط فاضلاب میتوانند از لولههای مدور برای اندازههای کوچک درستشده باشند یا از کانالهای سنگی برای اندازههای بزرگتر. معمولاً شبکه فاضلاب در زیرزمین قرار میگیرد و عمق آن بسته به لوکیشن آن و الزاماتِ سطح جریان متغیر است. قطر لولههای فاضلاب از ۴ اینچ تا چند فوت متغیر است. عمدتاً بیشترین مقدار شبکه فاضلاب در زیرزمین است. انسداد لولههای فاضلاب در حال حاضر در همه شهرهای کوچک و بزرگ جهان تقریباً متداول است.
این وضعیت به دلیل استفاده از کیسههای پلیاتیلن و دیگر مواد جامدی که به شبکه فاضلاب ریخته میشوند، به سطح هشدار رسیده است. خطوط فاضلاب مکرراً بسته میشوند که باعث انسداد لولهها و سرریز آب میشود و مشکلاتی را برای سرویسهای بهداشتی ایجاد میکند و همچنین خطر بیماری برای شهروندان را به دنبال دارد چون تمیز کردن آن نیازمند زمان هست. تشخیص نقطه انسداد دشوار هست و یکی از مسائل مهم در نگهداری شبکه فاضلاب است. دشواریها که با آن روبهرو هستیم غالباً به دلایل زیر است:
-
لولههایی با اندازههای کوچک
-
لولههایی پر از فاضلاب که آبی گلآلود از رسوبات، اجسام جامد و پلاستیکی هستند
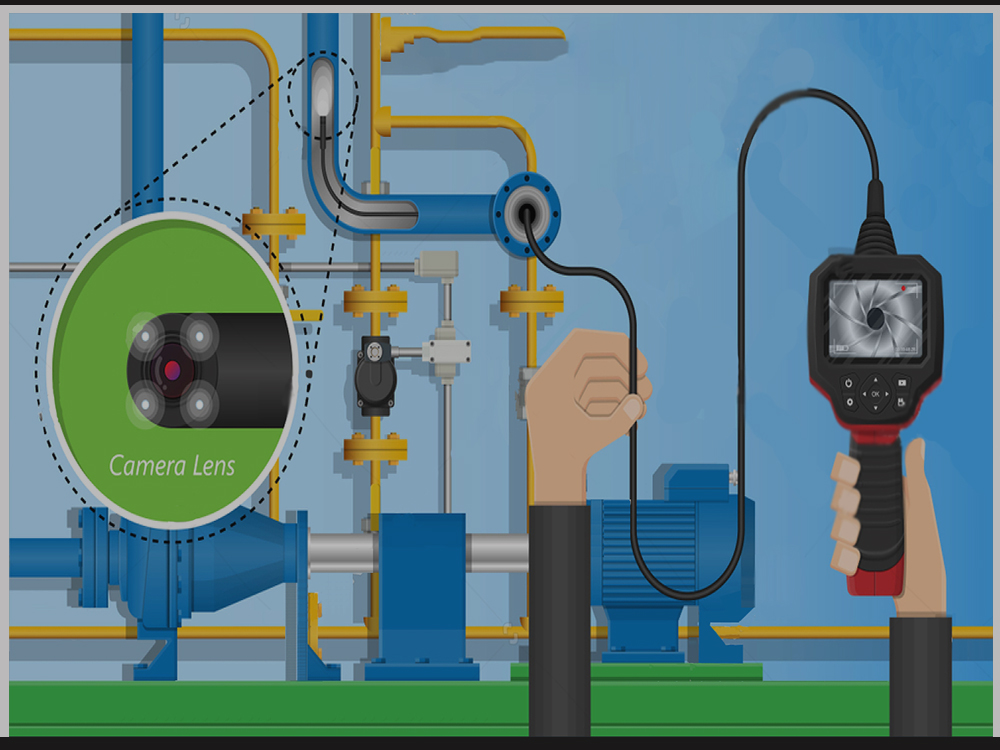
روشهای فعلی برای تشخیص انسداد بر اساس بازرسیهای بصریِ دستی و بازرسی با تجهیزات بر پایه دوربینهای CCD هست. مهمترین محدودیتِ این سیستمها این است که لولههای فاضلاب باید اول خالی شوند که بازرسی بصری توسط فرد یا تجهیزات بر پایه دوربین بتوانند کار کنند و بتوان تصاویری از انسداد یا خرابیها را ثبت کرد، مشاهده کرد و سپس آنالیز کرد.
در هند و دیگر کشورهای درحالتوسعه، تجهیزات بر پایه دوربینهای CCD معمولاً به دلیل قیمت بالا و دیگر مشکلات در دسترس نیستند و این کار بهصورت دستی با استخدام کارگران انجام میشود. حتی در لولههای فاضلاب با قطرهای بزرگ نیز، باید ابتدا تخلیه شوند و بعد بازرسی و پاکسازی توسط کارگران انجام میشود. و برای لولههای با قطر کم، این نیز امکانپذیر نیست.
در این مقاله، ما دستگاه رباتیکی با سامانه توکار برای تشخیصِ انسداد و آنالیز نوع آن با استفاده از سنسورهای اولتراسونیک را پیشنهاد میدهیم. این دستگاه بهاندازههای کوچک است که بتوان از آن در لولههای با قطر کم نیز استفاده کرد. این سنسورها در لولههایی با قطرهای مختلف قابلاستفاده هستند که با سوار کردن این سنسورها روی اندازههای مناسبی از ربات بهراحتی قابلاستفاده هستند. این ربات میتواند در آب لولههای فاضلاب در اندازههای مختلف حرکت کند. با استفاده از امواج فراصوت نیز میتوان نوع گرفتگی لوله را نیز مشخص کرد. از این سیستم برای تشخیص آسیبهای لوله توسط دیگر دستگاهها بعد از تغییرات کوچک نیز استفاده میشود.
برای آشنایی با مشکلات رایج لولههای فاضلاب و روشهای حل آن بر روی لینک کلیک کنید.
توصیف تچهیزات بازرسی فاضلاب رباتیک
این وسیله بازرسی فاضلابِ رباتیک با Embedded Systems دو بخش اصلی دارد که قسمت حاملِ رباتیک و قسمت سنسورهاست. حامل رباتیک سنسورها را حمل و در لولههای فاضلاب حرکت میکند. هردوی این قسمتها Embedded Systems قابلکنترل خود را دارند. اندازه کل این دستگاه کوچک است و میتواند از طریق یک منهول یا اتاقکهای بازرسی وارد لولههای فاضلاب شود. قسمت حامل و یک نمونه برای کنترل حرکت دستگاه طراحی خواهد شد. حامل رباتیک با چهارچرخ طراحیشده است که با موتور استپر رانده میشود. موتورها برای حرکت دلخواه درون فاضلاب بهصورت اتوماتیک با یک سامانه تعبیهشده توسط یک نرمافزار با همه ملزومات سختافزاری لازم کنترل میشوند.
در قسمت سنسورها از سنسورهای اولتراسونیک استفادهشده است. سنسورها تواناییهای لازم برای تغییر مسیر رادارند. این سنسورها مسئول مخابرهی دادههای بازتاب و عبور امواج اولتراسونیک توسط تغییراتِ مخابرهای در داخل لوله از گرفتگیهای لوله یا خرابیهای لوله هستند. این سیگنالها برای اندازه فاصله گرفتگیهای لوله و دیگر خرابیهای درون لوله آنالیز میشوند. دادهی بهدستآمده از این سنسورها در یک حافظه ذخیره میشود، توسط سامانه تعبیهشده یا رایانه پردازش و آنالیز میشود و نتایج و جزییاتِ گرفتگیهای لوله استنتاج میگردد.
کل این سیستم برای کار کردن بهطورمعمول در شرایط زیرزمینی و از میان انسدادهای لولههای فاضلاب طراحیشدهاند.
بهترین شرکت در حوزه ی طراحی، تولید و توسعه تجهیزات بازرسی فاضلاب رباتیک
سازنده ویدئو بروسکوپ صنعتی(ادامه مطلب)
طراحی و ساخت مدارات الکترونیکی(ادامه مطلب)
نمودار سیستم (تشخیص) انسداد لوله فاضلاب و شرح آن
نمودار سیستم کاملِ انسداد لوله در تصویر زیر نشان دادهشده است.
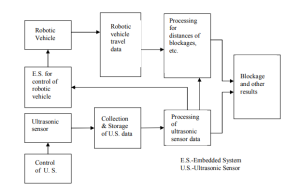
تشخیص انسداد لوله فاضلاب
توصیف هر بخش آن به شرح زیر است.
حامل رباتیک
این حامل رباتیک باید بتواند در چهار جهت جلو، عقب، بالا و پایین حرکت کند، تغییر مسیر بدهد و با تغییر مسیر لولهها بتواند بچرخد. موتورهای استپر که حرکت حامل را کنترل میکنند، تغییر حرکتهای دلخواه را نیز ایجاد میکنند. موتور استپر بهنوبت توسط سامانه تعبیهشده کنترل میشوند. سامانه تعبیهشده، محل سنسورها و سیستم کنترل دستگاه است.
سامانه تعبیهشده برای کنترل حامل رباتیک
این سامانه تعبیهشده شامل دو بخش نرمافزاری و سختافزاری است. قسمت سختافزاری برای کنترل حامل رباتیک با استفاده از یک میکروکنترلر و دیگر اجزای کمکی طراحیشده است. نرمافزار برای عملکرد صحیحِ سختافزار، طراحی، توسعه و تست میشود تا حرکت حامل را به شکل دلخواه کنترل کند.
انتقال دیتای حامل رباتیک
همینطور که حامل رباتیک حرکت میکند، اطلاعات موردنیاز برای پارامترهای حرکتِ حامل شناسایی و ذخیره میشوند. این دیتا شامل چرخش چرخها، مسیر حرکت، زمان و غیره است.
سنسورهای اولتراسونیک
سنسورهای اولتراسونیک روی حامل رباتیک سوار میشوند و مسیر آن توسط یک موتور استپر اختصاصی کنترل میشود. سنسور، امواج اولتراسونیک را ارسال میکند و بازتاب آن را بر اساس تغییرات در انتقال به دلیل مسدودیها یا خرابیهای داخل لولههای فاضلاب، دریافت میکند.
کنترلر سنسورهای اولتراسونیک
کنترل سیستم سنسورهای اولتراسونیک دو قسمت دارد، این دو قسمت شامل :
قسمت اول: حرکت سنسورها بهصورت افقی و عمودی کنترل میشود.
قسمت دوم : کارکرد سنسورها را بر اساس ولتاژ بهکار برده شده و دیگر پارامترهای موردنیاز، کنترل میکند.
جمعآوری و ذخیره دیتای سنسور اولتراسونیک
این بخش برای دریافت و ذخیرهی دیتای پارامترهای ورودی و خروجی سنسورها شامل مسیر سنسورها به روش درست طراحیشده است.
پردازش دیتای اولتراسونیک
پردازشگر تعبیهشده در نرمافزار طراحیشده، دیتای جمعآوریشده را در صورت نیاز پردازش میکند و بعدتر یک کامپیوتر نیز این اطلاعات را پردازش میکند. نتایج پردازششده اطلاعات کاملی از انسدادِ لولهها و هرگونه خرابیهای خطوط لوله را ارائه میدهد.
پردازش فاصله حامل و انسدادهای لوله
دیتای بهدستآمده برای تعیین محل دقیق حامل بر اساس نقطه ورود آن به لوله و محاسبهی فاصله گرفتگی لوله تا منهول استفاده میشود. همچنین، میتوان نقشهای از مسیر حرکت فاضلاب در خطوط فاضلاب تهیه کرد.
طراحی و اجرای تجهیزات بازرسی فاضلاب رباتیک
طراحی و اجرای سیستم (دستگاه) بازرسی فاضلاب رباتیک پیشنهادشده، درحالتوسعه است. همانطور که از توصیفات بالا مشخص است، اجرای آن ازنظر فنی و عملی ممکن است. جزئیات نتایج تستشده بعد از اتمام طراحی، ساخت و آزمایش در شرایط متفاوت در آینده گزارش خواهد شد.
چرا شرکت آریا فناوران آرتا بینش را برای انجام پروژه انتخاب کنیم؟
شرکت دانشبنیان آریا فناوران آرتا بینش مفتخر است که علیرغم مدت کوتاه توانسته است خدمات ارزشمندی را درزمینه ساخت نمونه تجهیزات بازرسی بصری مانند ویدیو متری، ویدیوسکوپ صنعتی، ربات بازرسی لوله و چاه و.. در صنایع کشور عزیزمان ایران ارائه نماید. و این شرکت توسط تعداد از متخصصین رشته مهندسی در پی انجام چندین پروژه موفق صنعتی و نیز شرکت در بسیاری از مسابقات سطح بالای ملی و بینالمللی باهدف خدمت به صنعت کشور بنیان نهاده شد.
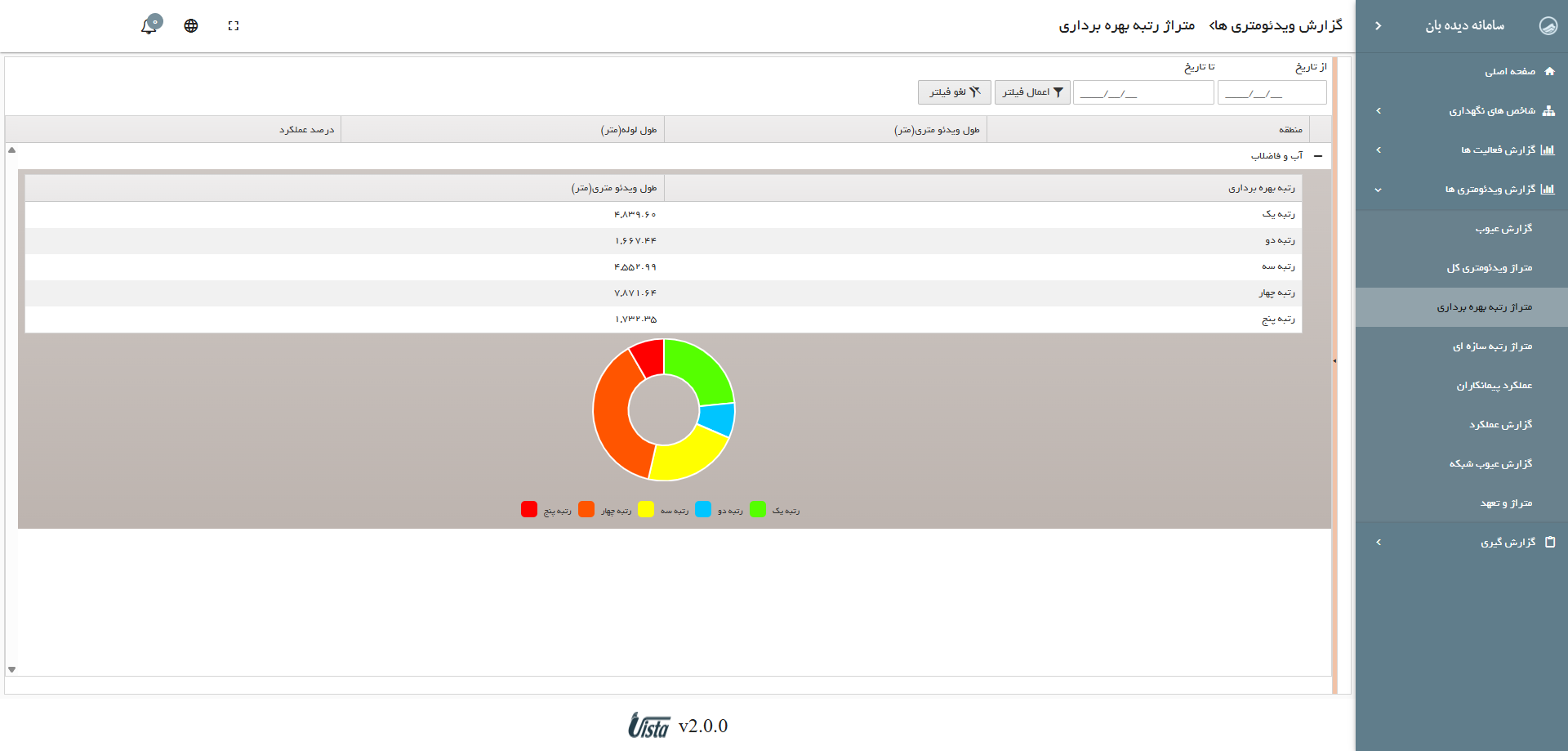
سامانه دیدهبان فاضلاب
شرکت دانشبنیان آریا فناوران با بهرهگیری از جوانان نخبه این سرزمین و اعتماد به دانش و انگیزه این جوانان قدم درراه توسعه و تعالی زیستبوم فناوری کشور نهاده است. با توجه به نیاز سازمانهای آب و فاضلاب و پیمانکاران بخش خصوصی آب و فاضلاب کشور به بارگذاری اطلاعات ویدئومتری بر روی سامانه دیدبان، تیم پشتیبانی آریا فناوران در این راستا در کنار همکاران محترم آبفا و پیمانکاران عزیز خواهد بود.
کلام آخر
در این مقاله، یک وسیله بازرسی لوله رباتیک با یک سامانه تعبیهشده در آن برای کار بازرسی مطرح کردیم. استفاده از امواج اولتراسونیک مشکلات سیستمهای فعلی که بر اساس دوربینهای CCD هستند را برطرف میکند. همچنین، بازرسی دستی توسط کارگران را حذف میکند. این طراحی، فناوری نگهداری سیستم فاضلاب را متحول میکند.
برآوردهای اولیه حاکی از قیمت تمامشدهی پایین این دستگاه است و بنابراین میتواند بهصورت تجاری و گسترده مورداستفاده قرار بگیرد و حتی میتواند توسط شهرداریهای شهرهای کوچک و بزرگ استفاده شود. نیروی انسانی لازم برای استفاده از دستگاه میتواند بهآسانی آموزش ببیند درحالیکه یک تکنیسین میتواند کار نظارت و پردازش دیتا را انجام دهد.علاوه بر این، دستگاه میتواند در اندازههای مختلف برای انواع خطوط فاضلاب، از اندازههای کوچک تا بزرگ، طراحی و تولید شود. با کمترین تغییرات ممکن، این فناوری میتواند بهصورت مستقیم در دیگر خطوط لوله مثل لولههای گاز، بنزین، آب آشامیدنی، صنعت و غیره بهکار گرفته شود.


[…] قبلی […]