
ویدئومتری چیست ؟
با رشد روزافزون فناوری و تکنولوژی در همه حوزههای زندگی، صنعت فاضلاب نیز از این تحولات عقب نمانده است. از سالها قبل، بازرسی شبکههای فاضلاب نیازمند ورود افراد به درون لولهها و استفاده از تجهیزات پیشرفته بوده است اما چه میشود اگر روشی بهتر و کاراتر برای بازرسی لولهها و شبکه فاضلاب وجود داشته باشد؟ ویدئومتری نام تکنولوژی ایست که بهصورت عمده در بازرسی و عیبیابی شبکههای فاضلاب استفاده میشود. شرکت دانشبنیان آریا فناوران برای ارتقاء سطح آگاهی ویدئومتری شبکه فاضلاب با انتشار مقالات، ویدئوهای آموزشی و برگزاری دورههای آموزشی اقدام به بالا بردن سطح اطلاعات پیمانکاران محترم آب و فاضلاب کشور دارد. در همین خصوص در صورت نیاز به مشاورههای اجرای شبکههای فاضلاب ویدئومتری و بازرسی شبکه فاضلاب و همچنین شستوشو شبکههای فاضلاب میتوانید با کارشناسان ما در تماس باشید. شرکت دانشبنیان آریا فناوران آرتا بینش با اتکا بر 5 محور اعتقاد، خلاقیت، دانش، فنآوری و تلاش قصد دارد: با ارائه خدمات بازرسی و محصولاتی مطابق با استانداردهای کیفیتی ملی و بینالمللی و همچنین بهرهگیری از سیستم مدیریت تکنولوژی، نسبت به تأمین نیازهای صنایع وابسته به شبکههای انتقال سیال و انرژی، از نظر بهرهگیری از تجهیزات بازرسی فنی و عملیاتی در حوزه فناوریهای رباتیک، تلاش نموده و ضمن جلب رضایت صنایع نیازمند، سرمایهگذاران و کارکنان، در جهت کسب اعتماد در عرصههای ملی و بینالمللی گام بردارد.ویدئومتری
واژه ویدئومتری در تعریف کلی یک روش تصویربرداری است که با استفاده از دوربینها و سنسورهای خاص امکان بازرسی و شناسایی عیوب و نقاط ضعف در لولههای فاضلاب را بهصورت دقیق و بدون نیاز به ورود افراد و تجهیزات گرانبها فراهم میکند. با این روش مانند تطبیق عکسهای دوبعدی، امکان مشاهده و صحت سنجی وضعیت داخل لولهها و شبکه فاضلاب فراهم میشود.اهمیت بازرسی و ویدئومتری لولههای فاضلاب
باگذشت چندین دهه از احداث شبکههای فاضلاب در بسیاری از شهرها و بروز نقصهای قابلتوجه حتی در فاضلابروهایی که از زمان اجرای آنها مدت زیادی سپری نشده است لزوم اتخاذ تدابیری جهت بهرهبرداری صحیحتر و در مواردی بازسازی و اصلاح فاضلابروها امری ضروری به شمار میآید. همواره معضلات مدیران بخش بهرهبرداری حفظ سرمایهها و افزایش عمر مفید تجهیزات با کمترین هزینه بوده است. برای کاهش مشکلات بهرهبرداری، ابتدا باید آنها را شناسایی کرده و با برطرف کردن آنها، از وقوع مشکلات در زمان بحرانی جلوگیری کرد. اهمیت بازرسی و ویدئومتری لولههای فاضلاب باگذشت زمان بیشتر خواهد شد; در سالهای اخیر با توجه به در مدار بهرهبرداری قرار گرفتن شبکههای فاضلاب شهری و فرسودهشدن این شبکهها، اتفاقات غیرقابلپیشبینی که در حوزه فاضلاب رخداده واحتمالا در آینده این دست اتفاقات بیشتر هم خواهد شد. در همین راستا به تشریح و معرفی ویدئومتری شبکه فاضلاب میپردازیم.استفاده از فناوری ویدئومتری در سیستمهای فاضلاب
استفاده از ویدئومتری در سیستمهای فاضلاب علاوه بر اینکه کار انجام بازرسی را سادهتر میکند، هزینهها و زمان موردنیاز را نیز به حداقل میرساند. در حال حاضر، باوجود روشهای سنتی بازرسی، که ازجمله آنها میتوان به بازرسی دستی و بازرسی راداری اشاره کرد، استفاده از ویدئومتری پیشرفته، کار تخصصی و مؤثر را در بررسی لولهها فراهم میکند. بهطورکلی،عملیات ویدئومتری که با ربات بازرسی لوله انجام میشود، موجب تسهیل در تشخیص انشعابات، شکستگیها، نشتها و دیگر ضعفهای فنی در لولههای فاضلاب میشود. ازجمله مزایای استفاده از ویدئومتری میتوان به موارد زیر اشاره کرد: دقت بالا: ویدئومتری امکان مشاهده تصاویر با واضحیت و کیفیت بالا را فراهم میکند، که منجر به شناسایی دقیقتر و اسکن مؤثرتر لولهها میشود. کاهش هزینهها و زمان: با استفاده از ویدئومتری، نیاز به تجهیزات پیشرفته و متخصصین برای ورود به داخل لولهها کاهش مییابد. همچنین، زمان برگزاری بازرسی با استفاده از این تکنولوژی نیز بهشدت کاهش مییابد. مشاهده در زمان: با استفاده از ویدئومتری، میتوان بهصورت زنده از داخل لولهها و شبکه فاضلاب تصاویر برداری کرده و بازرسی را در زمان واقعی انجام داد.اهداف ویدئومتری
ویدئومتری از داخل شبکههای جمعآوری فاضلاب ممکن است به دلایل ذیل انجام پذیرد:- جستجو برای انشعابات ثبتنشده
- تعیین محل ورود آبهای زیرزمینی به شبکه
- شناسایی محل آدمروهای پنهانشده در زیر آسفالت.
- ارزیابی شرایط اولیه فاضلابرو برای اقدامات بهسازی
- طبقهبندی فاضلابروها ازلحاظ عملکرد سازهای و تعیین اولویتهای بهسازی.
- بازرسی شرایط داخل لوله برای شناسایی عیوب و مشخص نمودن محلهایی که دارای مشکل میباشند.
- کنترل کیفیت و ارزیابی اثربخشی اقدامات انجامشده در تعمیر، بازسازی و نگهداری شبکههای جمعآوری فاضلاب.
- کنترل کیفیت اجرا و تطابق شبکه اجراشده با مشخصات فنی درخواستی بهمنظور تحویل گیریِ کار اجراشده از پیمانکار.
- شناسایی آسیبهای ایجادشده در شبکه به علت حفاری، ساخت تأسیسات مجاور جادهسازی، ساختمانسازی و غیره

ربات بازرسی لوله:
یکی از روشهای مطمئن و مقرونبهصرفه برای بازبینی و بررسی خطوط لوله فاضلاب، استفاده از ربات ویدئومتری و بازرسی لوله میباشد. استفاده نکردن از این روش ممکن است مشکلات و پیچیدگیهایی را به همره داشته باشد ازجمله آن میتوان به مشکلاتی پیرامون مکانیابی دقیق عیوب در یک خط لوله، و درنتیجه حفاری بخش وسطی از یک ناحیه شهری، حفاری مشکلتر، ایجاد تأثیر منفی روی کسبوکار وزندگی ساکنان آن منطقه اشاره کرد. رباتی به بتواند فضای لوله را پیمایش کند، مکان دقیق عیوب را بهدقت شناسایی خواهد کرد.مزایای صنعتی ربات بازرسی لوله:
مزایای صنعتی و تجاری ساخت رباتهایی که توانایی پیمایش، عیبیابی و تعمیر خط لوله را در صورت فعال بودن خط لوله دارند، بسیار زیاد است. در این روش بازرسی و تعمیر خطوط لوله هیچ خللی در کار آن ایجاد نخواهد کرد.وظیفه ربات ویدئومتری شبکه فاضلاب:
بهطور خلاصه ربات ویدئومتری لوله از یک دوربین تصویربرداریِ مجهز به سیستم روشنایی که بر روی یک عدد ربات قابل هدایت نصبشده است. برای تصویربرداری از داخل لولههای فاضلاب (که به دلیل کوچکی یا شرایط نامساعد قابل ورود توسط انسان نیستند)، استفاده میشود. درزمینه نحوه بازرسی نیز استانداردها و دستورالعملهای متعددی در دنیا تدوین گردیده است که هدف اصلیِ همگیِ آنها، طبقهبندی و ذخیرهسازی اطلاعات حاصل از بازرسی به کمک دوربین مداربسته میباشد، که به آن ویدئومتری میگویند.- توانایی چرخش دورانی دوربین و چرخش عمودی/ افقی
- دوربین تصویربرداری باید علاوه بر امکان ضبط تصاویر ویدئویی، توانایی عکسبرداری از نقاط موردنظر اپراتور را نیز داشته باشد.
- دوربین تصویربرداری باید مجهز به تکنولوژی لیزر برای اندازهگیری قطر ترکها و تعیین ابعاد اجسام خارجی نفوذ کرده به درون شبکه باشد.
- قابلیت بالانس اتوماتیک رنگ و قابلیت بزرگنمایی اپتیکال و دیجیتال را داشته باشد. همچنین باید دارای حداقل وضوح تصویر ۴۰۰ خط باشد.
- الف) اندازهگیری تغییر شکل (دو پهنشدگی) لوله
- ب) اندازهگیری ابعاد سطح مقطع یا قطر لوله

ربات بازرسی شبکه فاضلاب
ویژگیهای اصلی موردنیاز ربات ویدئومتری فاضلاب عبارتاند از:
- توانایی اندازهگیری شیب را داشته باشد.
- قابلیت هدایت از طریق واحد کنترل را داشته باشد.
- قابلیت انتقال نیروی رانشی بهتمامی محورهای ربات را دارا باشد.
- ربات میبایست مجهز به موتور الکتریکی با جریان مستقیم(DC) باشد.
- ربات باید توانایی عبور از قوسهای احتمالی شبکه و موانع موضعی ایجادشده در فاضلابروها را بدون واژگونی و همراه با حفظ عملکرد مطلوب داشته باشد.
- برای اقطار بالا، ربات ویدئومتری میبایستی مجهز به سیستم بالابر الکتریکیِ دوربین باشد تا لنز در مرکز فاضلابرو قرارگرفته و توزیع نور نیز به خوبی صورت پذیرد.
- ربات باید از مواد ضد خوردگی ساختهشده باشد. یعنی توانایی کار در محیطهای بهشدت خورنده فاضلابروها را داشته و دارای خاصیت ضد انفجار نیز باشد.
در رابطه با چرخهای ارابه نیز توجه به نکات زیر ضروری است:
- جهت کار در قطرهای متنوع از لوله و انتقال بهینه نیروی محرکه، همچنین برای افزایش ارتفاع دوربین، شاسی ربات های ویدئومتری باید توانایی و فضای لازم جهت نصب چرخ با قطرها و ویژگیهای مختلف را داشته باشد.
- اتصال چرخها به بدنه ربات ویدئومتری باید به نحوی باشد که در حداقل زمان بتوان نسبت به تعویض چرخها اقدام نمود.
- به علت تماس دائم چرخها با شبکه فاضلاب، جنس این چرخها باید از مواد ضد خوردگی باشد.
- سرعت حرکت ربات ویدئومتری: قطر کمتر از ۲۰۰ میلیمتر ۰٫۱ متر بر ثانیه.
- سرعت حرکت ربات ویدئومتری : قطر کمتر از ۳۰۰ میلیمتر و بیشتر از ۲۰۰ میلیمتر ۰٫۱۵ متر بر ثانیه.
- سرعت حرکت ربات ویدئومتری : بیشتر از ۳۰۰ میلیمتر ۰٫۲ متر بر ثانیه.

تیم ویدئومتری آریا فناوران
- CCTV
- SSET
- دوربین گردان با بزرگنمایی حسگر تصویر با وضوح بالا، امکان چرخش کامل افقی و عمودی و بزرگنمایی ؛ بدنه فلزی مقاوم در برابر آب و خوردگی درجه حفاظت IP68 .
- حلقه نور الایدی و تنظیم روشنایی چراغهای الایدی دورتادور لنز قرار میگیرند تا لوله از همه جهت بهطور یکنواخت روشن شود و سایه ایجاد نشود. شدت نور با کنترلر داخلی متناسب با قطر لوله تغییر میکند.
- ربات حامل شاسی چرخدار یا زنجیری با موتور ، قطر چرخها قابل تعویض است تا در لولههای فاضلاب با اندازه مختلف حرکت کند. حسگر شمارشگر دور چرخ (انکودر) فاصله پیمودهشده را برای ثبت موقعیت عیب در متراژ گزارش میدهد.
- کابل ترکیبی تقویتشده کابل چندمنظوره با رشتههای برق، سیگنال تصویر و داده فرمان، روکش کولار برای استحکام؛ به درام جمعکن متصل است تا از پیچیدن و آسیب جلوگیری شود.
- قرقره و وینچ خودکار
- واحد کنترل و اپراتوری قاب صنعتی با نمایشگر ضدبازتاب، جویاستیک برای حرکت دوربین، کلیدهای کنترل نور و سرعت، و نرمافزار استاندارد طبقهبندی عیوب براساس دستورالعمل WRC .
- سامانه ثبت تصویر و داده کارت دریافت تصویر با فشردهسازی پیشرفته و درج اطلاعات روی تصویر (تاریخ، ساعت، متراژ، آدرس).
- منبع تغذیه و ایمنی الکتریکی منبع سوئیچینگ پایدار با فیلتر تداخل الکترومغناطیسی، محافظ نوسان و کلید نشتی جریان برای ایمنی در محیطهای مرطوب؛ در داخل ربات تبدیل ولتاژِ تثبیتشده وجود دارد.
- حسگر موقعیت و شیب
- نرمافزار مدیریت بازرسی بستر نرمافزاری مطابق دستورالعمل طبقهبندی شرایط لوله WRC که امکان وارد کردن کد عیب، تولید گزارش، و خروجی قابل اتصال به سامانه را فراهم میکند.
سیستمSSET
یک روش نسبتاً جدید در بازرسی شبکههای فاضلاب است که در آن دوربینی ویژه با سرعت ثابت در لولهها حرکت کرده و بدون آنکه مانند سیستم سنتی CCTV نیازی به توقف و حرکت مجدد در محل اتصالات یا عیوب داشته باشد، اقدام به تصویربرداریِ پیوسته از داخل لوله مینماید .SSET علاوه بر ارائه تصویری شبیه به آنچه CCTV ارائه مینماید، یک تصویر اسکن شده ۳۶۰ درجه از سطح داخلی لوله نیز ارائه مینماید. تصویر ۳۶۰ درجه امکان مشاهده تمام سطح داخلی فاضلابرو در نمای پلان را فراهم نموده و به مهندس مشاور این امکان را میدهد که انواع عیوب موجود در لوله را مشاهده کرده، کدگذاری نموده و اندازه بگیرد. بهعبارتدیگر،SSET دو نما از داخل فاضلابرو ارائه مینماید. یک نمای روبرو در راستای محور لوله و یک نمای عمود بر محور از دیوارههای فاضلابرو که بر سطح دو عدی تصویر میشود. مقایسه سیستم SSET با CCTVمزایای سیستم SSET عبارتاند از:
- در حین بازرسی با سیستم SSET نیاز به توقف دستگاه بهمنظور بررسی و ثبت عیوب توسط اپراتور نمیباشد درحالیکه در سیستم CCTVاپراتور باید دستگاه را در محل عیوب متوقف کرده و موضع را موردبررسی قرار دهد تا کد مناسب را ثبت نماید.
- در سیستم SSETبازرسی طول بیشتری از فاضلابروها با توجه بهسرعت ثابت و بالاتر دستگاه میسر است.
- در سیستم SSET اپراتور تنها مسئول هدایت دستگاه در فاضلابرو و دریافت اطلاعات بوده و در تفسیر نتایج نقشی نخواهد داشت . درحالیکه در سیستم CCTV اپراتور باید آشنایی کافی با آسیبهای شایع شبکههای فاضلاب و اصول کدگذاری و طبقهبندی فاضلابروها داشته باشد.
- در سیستم SSET اطلاعات با دقت و کیفیت بالاتر بهطور پیوسته و ۳۶۰ درجه با رزولوشن بالا در اختیار تحلیلگر وضعیت فاضلابرو قرار خواهد میگیرد درحالیکه در سیستم CCTV اطلاعات در محدوده پایش اپراتور و باکیفیتی متوسط در اختیار تحلیلگر قرار خواهد گرفت.
- در صورت استفاده از سیستم SSETثبت کدها و اندازهگیری عیوب در هر زمان دلخواه پس از پایان عملیات بازرسی توسط مهندس مشاور و در دفتر کار امکانپذیر میباشد. این امر منجر به افزایش دقت کار میگردد. درحالیکه در سیستم CCTV عیوب میباید در محل پیمایش توسط اپراتور اندازهگیری و ثبت شود.
معایب سیستم SSET عبارتند از:
- سیستم های SSET عمدتاً گران تر از سیستمهای CCTV می باشند.
- استفاده از سیستمهای SSET هنوز مانند CCTV فراگیر نشده است و در بسیاری از نقاط جهان همچنان از سیستمهای سنتی CCTV استفاده می شود. این امر باعث شده است که روند توسعه سیستمهای SSET نسبتاً کند باشد.
- تعداد کارخانه های تولید کننده سیستم SSET محدود بوده و مدلهای موجود از تنوع کمتری برخوردار هستند.
سیستم بازرسیِ مورداستفاده از هر نوعی که انتخاب شود، لازم است دارای حداقل قابلیتهای زیر باشد:
- امکان تصویربرداری از داخل فاضلابرو باکیفیت خوب و نور مناسب بهگونهای که امکان تشخیص عیوب بهصورت واضح وجود داشته باشد.
- توانایی بازرسی از شبکههای فاضلاب که به دلیل وجود گازهای منفجر شونده دارا محیطهای پرخطر انفجاری هستند برخورداری از خاصیت ضد انفجار(EX).
- توانایی بازرسی ازشبکههای فاضلاب با سطح داخلی ناهموار که ممکن است در مسیر فاضلابرو دارای فرورفتگی یا برآمدگی باشند.
- توانایی کار در محیط دارای رطوبت۱۰۰% بهگونهای که دوربین حتی در صورت قرار گرفتن بر اساس استاندارد IP در شرایط مستغرق، خواص ضد آب خود را حفظ نماید. بر اساس استاندارد ( IP68 DIN40050)
- واحد کنترل.
- دوربین تصویربرداری.
- کابل و سیستم قرقره جمع کننده کابل
- خودروی بازرسی و تجهیزات حمل و بارگیری ارابه و دوربین.
- دستگاه حمل دوربین تصویربرداری و ملحقات مربوط به آن نظیر سیستم تأمین روشنایی.
- نرمافزارهای موردنیاز برای کنترل عملیات، کدگذاری عیوب، طبقهبندی فاضلابروها و تهیه گزارش.
نرم افزار ویدئومتری
در دنیای پر از فناوری و نوآوری، نرم افزارهای مختلفی وجود دارند که به بهبود و بهره وری در صنایع مختلف کمک می کنند. یکی از این نرم افزارها، نرم افزار ربات ویدئومتری شبکه فاضلاب است. نرم افزار ویدئومتری نه تنها به شما کمک می کند در مدیریت و نظارت بر شبکه فاضلاب خود موثر تر عمل کنید، بلکه با کمک ابزارهای تحلیلی و گزارش گیری قدرتمند خود، به شما این امکان را می دهد تا به طور دقیق و کارآمد اطلاعات مورد نیاز خود را استخراج کنید. نرم افزار ربات ویدئومتری شبکه فاضلاب با طراحی کاربرپسند و قابلیت های هوش مصنوعی، به شما این امکان را می دهد تا به طور سریع و کارامد تمامی نیازهای خود را در زمینه مدیریت و نظارت بر شبکه فاضلاب برطرف کنید. این نرم افزار با زبان فارسی و رابط کاربری ساده، به شما این امکان را می دهد که بدون نیاز به دانش فنی عالی، به بهره وری بالاتری دست یابید. با استفاده از ربات ویدئومتری شبکه فاضلاب، به یک تجربه جدید از مدیریت و کنترل شبکه فاضلاب خود دست پیدا کنید و خود را به یک نیروی حرفه ای در این حوزه تبدیل کنید.نرم افزار ویدئومتری چیست ؟
نرم افزار ویدئومتری شبکه فاضلاب یک ابزار قدرتمند و جامع برای تحلیل وضعیت لولههای شبکه فاضلاب است که توانایی بهبود گزارشات ارائه شده از وضعیت این شبکه را داراست. این نرم افزار امکاناتی را در اختیار کاربران قرار میدهد که به آنها کمک میکند، با استفاده از این نرم افزار، پیمانکاران اطلاعات دقیق و کاملی در مورد وضعیت خط لوله های فاضلاب مورد نظر را به دست آورند و اقدامات بهبودی مورد نیاز را برای شبکه های فاضلاب آسیب دیده انجام دهند. با استفاده از فناوری های پیشرفته و تصویربرداری، نرم افزار ویدئومتری میتواند به صورت دقیق و شفاف، ابعاد، انحنای وضعیت لولههای شبکه فاضلاب را نمایش دهد.وظیفه اپراتور ویدئومتری شبکه فاضلاب
وظیفه اپراتور بازرسی شبکه فاضلاب در کار با دستگاه ربات و نرم افزار ویدئومتری، بسیار اهمیت دارد. با استفاده از این دستگاه و نرم افزار، اپراتور قادر است تا به صورت دقیق و به سرعت اجزا مشکلات مختلف شبکه فاضلاب را بررسی و ارزیابی کند. اپراتور بازرسی با در نظر گرفتن یکی از استاندارد های ویدئومتری(استانداردهای WRC و EN) باید در هنگام ویدئومتری با توجه به عیوب مشاهده شده کد عیب های مربوطه را وارد کرده که این کد عیوب هم در دیتا بیس ذخیره میشود و هم به صورت زنده روی تصویر نمایشی از لوله قرار میگیرد و در فیلم خروجی نیز ذخیره میشود. این عیوب به همراه امتیاز دهی های دقیق که به پیمانکاران در ارتقای وضعیت سلامت شبکه فاضلاب بازرسی شده کمک میکند، در فرمی که توسط نرم افزار تهییه میشود به اپراتور تحویل میگردد.نقش اپراتور ویدئومتری شبکه فاضلاب
اپراتور بازرسی شبکه فاضلاب با استفاده از دستگاه ربات ویدئومتر میتواند به معایب و مشکلات موجود در خطوط فاضلاب دست یابد که این امر میتواند به جلوگیری از اتلاف منابع و حفظ سلامت شبکه جمع آوری فاضلاب کمک کند. علاوه بر این، نحوه استفاده از نرم افزار ویدئومتری همچنین به اپراتور در تحلیل دادهها، ثبت گزارشات و ارائه پیشنهادات به منظور بهبود عملکرد شبکه فاضلاب کمک میکند. به طور کلی، نقش اپراتور بازرسی شبکه فاضلاب به همراه دستگاه ربات ویدئومتری و نرم افزار ویدئومتری بسیار ضروری است . این فناوریهای پیشرفته باعث میشوند تا فرآیند بازرسی، تشخیص و پیگیری مشکلات در شبکه فاضلاب به شکلی سریع، دقیق و کارآمد صورت بگیرد که در نهایت به بهبود عملکرد و بهره وری شبکه فاضلاب کمک میکند. همچنین، نرم افزار ویدئومتری شبکه فاضلاب توانایی تحلیل مستند و دقیق از وضعیت لولهها، این نرم افزار به اپراتور و شرکت ارائه دهنده خدمات امکان ارائه پیشنهادات و برنامه ریزی های لازم برای اصلاح و بهبود وضعیت شبکه فاضلاب را به پیمانکاران میدهد . از این رو، استفاده از نرم افزار ویدئومتری به عنوان یک ابزار کارآمد برای بهبود عملکرد و افزایش کارایی شبکه فاضلاب بسیار حائز اهمیت است. طراحی و ساخت نرم افزار ربات ویدئومتری مطابق با استاندارد WRC یکی از چالشهایی است که در حوزه تحلیل دیتای به دست آمده از ویدئومتری شبکه فاضلاب مطرح است. ویدئومتری به عنوان یک فناوری نوین در راستای بهبود وضعیت سلامت لوله های جمع آوری فاضلاب نیاز به نرم افزارهای مبتنی بر آن، روز به روز افزایش میابد. نرم افزار ویدئومتری یک بستر برای سهولت خوانایی اطلاعات و داده های گرفته شده از عملیات ویدئومتری درون لوله های شبکه فاضلاب است. با توجه به استانداردهای بینالمللی و ضرورت ارائه خدمات با کیفیت در این زمینه، اهمیت طراحی و ساخت نرم افزار های ویدئومتری با استانداردهای بین المللی بیش از پیش مشخص شده است. ایجاد یک نرم افزار ویدئومتری که قابلیت گزارش گیری قابل فهم ازعملیات ویدئومتری انجام شده در لوله های شبکه های فاضلاب با توجه به استاندارد های WRC به کاربران امکان می دهد تا به راحتی با این نرم افزار ارتباط برقرار کنند. این امر باعث افزایش سطح آگاهی اپراتورهای بازرسی و پیمانکاران از عیوب و مشکلات موجود در لوله های فاضلاب میشود.ویژگی های نرم افزار ویدئومتری
- ثبت عیوب بر اساس کدهای WRCویرایش پنج
- قابلیت گزارش گیری بر اساس سرنویس WRC
- نمایش شناسنامه خط بر روی هر فیلم در پنج ثانیه اول نمایش
- کاهش خطای اپراتور در ثبت اطلاعات آسیب ها با بررسی های نرم افزاری عیوب
- قابلیت نمایش فیلم ارسالی ربات و ضبط فیلم بر روی هارد کامپیوتر در صورت نیاز
- قابلیت اتصال به بانک اطلاعاتی مکانی GIS و نمایش و ثبت اطلاعات بر روی نقشه ها
- قابلیت ثبت اطلاعات سنسورشیب سنج و ارائه چند نمودار از شیب لوله در گزارش نهایی
- قابلیت نمایش گرافیکی لوله به همراه محل عیوب از آدم رو ورودی ربات تا آدم رو مقصد
- قابلیت ثبت اطلاعات سنسور لیزر قطر سنج و ارائه گراف دوپهنی مقطع لوله در گزارش نهایی
- امکان محاسبه درجه هر خط (ICG)و رتبه بندی خطوط بر اساس دستورالعمل آب و فاضلاب کشور
- قابلیت اضافه کردن متن توضیحی توسط اپراتور به صورت زیر نویس روی هر قسمت دلخواه از فیلم
- قابلیت گرفتن عکس از داخل لوله و ثبت آن عکس به همراه ثبت نوع عیب به صورت زیر نویس توسط اپراتور
- قابلیت ثبت راحت کلیه اطلاعات پیمانکار و ویدیومتر و کارفرما به همراه کلیه اطلاعات محل اجرای ویدیومتری
- قابلیت نمایش اطلاعات کلیه سنسورهای ربات اعم از شیب سنج، قطر سنج، دما سنج، فشار سنج، طول کابل و موقیت ربات
نرم افزار ویدئومتری شبکه فاضلاب شرکت دانشبنیان آریا فناوران
با عنایت به اهمیت شبکه های فاضلاب در شهرها، نگهداری از لوله های فاضلاب بیش از پیش مورد توجه سازمان های دولتی و خصوصی مربوطه قرار گرفته است. در همین راستا، توسعه ربات های ویدئومتری شبکه فاضلاب شتاب بیشتری گرفته تا این نیاز در شبکه آب و فاضلاب برطرف گردد. اما موضوعی که باعث میشد این بازرسی ها نتواند به خوبی انجام شود، این بود که نرم افزارهای ربات ویدئومتری خارجی بودند و مشکلاتی را در بر داشتند. این مشکلات عبارت بودند از :- عدم ایجاد خروجی های لازم برای سامانه های داخلی
- بسته بودن بخشی از امکانات نرم افزار به خاطر تحریم
- امکان اتصال به اینترنت و رصد اطلاعات شبکه های فاضلاب ایران
- عدم تناسب عیوب در نرم افزارهای خارجی و عیوب در لوله های فاضلاب ایران و…

نرم افزار ویدئومتری

چارت راهنمای فرم ارائه شده توسط نرم افزار
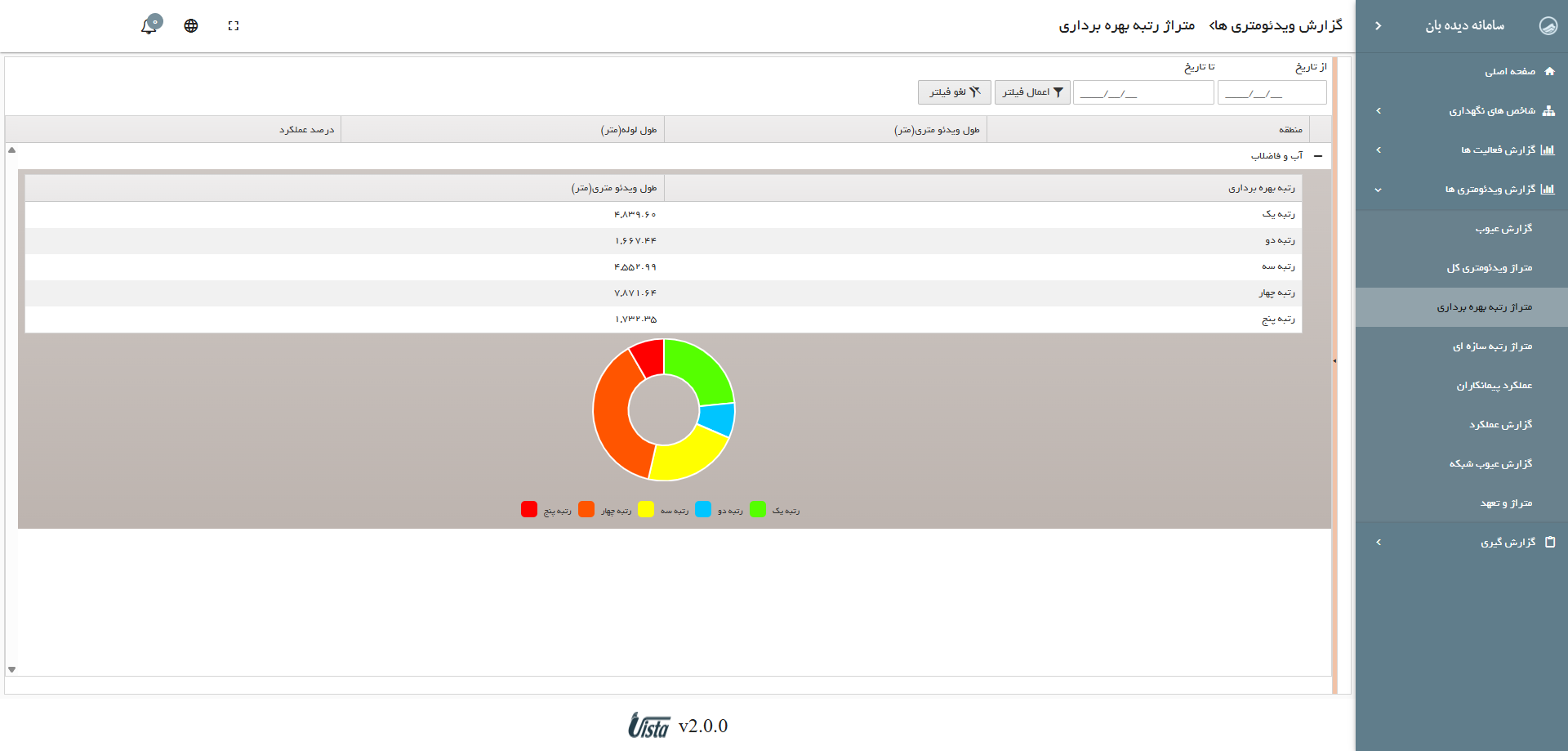
سامانه دیدهبان فاضلاب؛ زیرساخت هوشمند مدیریت و نظارت بر شبکه فاضلاب کشور
با گسترش پروژههای ویدئومتری و افزایش حجم دادههای تصویری حاصل از بازرسی خطوط فاضلاب، نیاز به یک زیرساخت متمرکز، امن و تخصصی برای بارگذاری، مدیریت و تحلیل این اطلاعات بیش از پیش احساس میشود. سامانه دیدهبان فاضلاب با هدف پاسخگویی به همین نیاز و در راستای تسهیل فرآیند نظارت بر شبکه فاضلاب کشور طراحی و پیادهسازی شده است.
این سامانه با تمرکز بر نیاز پیمانکاران، مشاوران و همکاران شرکتهای آب و فاضلاب، امکان بارگذاری فیلمها، گزارشها و خروجیهای ویدئومتری را فراهم کرده و بستری مناسب برای مدیریت یکپارچه دادههای شبکه فاضلاب ایجاد نموده است. ایجاد این زیرساخت تخصصی، با بهرهگیری از نیروی انسانی جوان و نخبگان ایرانی، گامی مؤثر در جهت بومیسازی فناوریهای مرتبط با مدیریت شبکه فاضلاب محسوب میشود.
در حال حاضر، سامانه دیدهبان شبکه فاضلاب بهعنوان یک زیرساخت عملیاتی و نظارتی، نقش مهمی در ارتقای کیفیت پایش، تحلیل و تصمیمسازی در حوزه فاضلاب کشور ایفا میکند.
نقش نرمافزار PIROS در تعامل با سامانه دیدهبان فاضلاب
نرمافزار پایروس PIROS (Pipe Inspection Robot Software) بهگونهای طراحی شده است که بتواند خروجیهای استاندارد و سازگار با سامانههای بومی نظارت بر شبکه فاضلاب، از جمله سامانه دیدهبان فاضلاب، تولید کند. این ویژگی، علاوه بر تسهیل فرآیند تبادل داده، نقش مهمی در جلوگیری از خروج اطلاعات حساس کشور به خارج ایفا میکند.
ارائه خروجیهای سازگار با سامانه دیدهبان فاضلاب، این امکان را برای ناظران و کارشناسان فاضلاب کشور فراهم میسازد تا دادههای ویدئویی را با دقت بالا تحلیل کرده و بدون وابستگی به پلتفرمهای خارجی، از اطلاعات تولیدشده در پروژههای ویدئومتری استفاده کنند.
ثبت و تحلیل عیوب لوله در نرمافزار پایروس
یکی از قابلیتهای کلیدی نرمافزار پایروس، امکان مشاهده مستقیم عیوب لوله از طریق تصویر دوربین ربات و ثبت همزمان عیب روی تصویر و در گزارش است. این فرآیند باعث میشود اطلاعات عیوب بهصورت دقیق، مستند و قابل پیگیری ذخیره شوند.
در ادامه، مسئولین نظارت و کاربران سامانه دیدهبان فاضلاب میتوانند مجدداً فیلم داخل لوله را مشاهده کرده و عیبهای ثبتشده را برای تحلیلهای دقیقتر بررسی نمایند. این قابلیت، نقش مهمی در افزایش شفافیت دادهها و کاهش خطای انسانی در تفسیر نتایج ویدئومتری دارد.

گزارش ارائه شده از خط لوله فاضلاب توسط نرم افزار پایروس
گزارشگیری جامع از خطوط فاضلاب در پایروس
گزارش Word، تصاویر عیوب و اطلاعات مکانی
نرمافزار پایروس از هر عیب ثبتشده، یک تصویر مجزا از فیلم ویدئومتری ذخیره میکند. این تصاویر بههمراه نام عیب و فاصله آن از ابتدای لوله، در فایل گزارش که در قالب Word (DOCX) تهیه میشود، قرار میگیرند.
در این گزارش همچنین:
-
تصویری از منهول
-
نمودار شیب خط
-
اطلاعات عمق
ارائه میشود. این ساختار گزارشگیری باعث میشود کارشناسان شرکتهای آب و فاضلاب و ناظران سامانه دیدهبان فاضلاب، بتوانند اطلاعات هر خط و هر منهول را بهصورت کامل، دقیق و یکپارچه در اختیار داشته باشند.
اکسل عیوب؛ ابزاری برای تحلیل دقیقتر دادهها
یکی از نیازهای مهم در پروژههای ویدئومتری، بررسی جزئیات عیوب بهصورت ساختیافته و قابل تحلیل است. این نیاز از طریق خروجی اکسل عیوب (XLSX) که یکی از خروجیهای نرمافزار پایروس است، بهطور کامل پوشش داده میشود.
در این فایل، اطلاعات عیوب بهصورت طبقهبندیشده ثبت شده و امکان تحلیل آماری، فیلتر، دستهبندی و گزارشگیری پیشرفته را برای کارشناسان فراهم میکند. این قابلیت، تکمیلکننده نقش سامانه دیدهبان فاضلاب در مدیریت دادهمحور شبکه فاضلاب است.
طراحی نرمافزار ویدئومتری؛ تلفیق دانش فنی و تجربه میدانی
طراحی یک نرمافزار ویدئومتری حرفهای، نیازمند دانش فنی عمیق در حوزه فناوری اطلاعات، نرمافزارهای کامپیوتری و پردازش دادههای ویدئویی است. از آنجا که این نرمافزار باید توانایی اندازهگیری، تحلیل و تفسیر دادههای تصویری را داشته باشد، استفاده از متدولوژیهای پیشرفته و الگوریتمهای دقیق پردازش داده امری ضروری است.
در همین راستا، شرکت دانشبنیان آریا فناوران با اتکا به بیش از ۵ سال تجربه عملی در حوزه ویدئومتری شبکه فاضلاب، به این جمعبندی رسید که رباتهای ویدئومتری برای دستیابی به حداکثر کارایی، نیازمند یک نرمافزار جامع، یکپارچه و تحلیلمحور هستند.
نرمافزار پایروس؛ پاسخ به نیاز واقعی ویدئومتری شبکه فاضلاب
این نیاز واقعی، منجر به طراحی و توسعه نرمافزار ویدئومتری پایروس شد؛ نرمافزاری متمایز با کارایی بالا که بهصورت ویژه برای تحلیل دادههای ویدئومتری طراحی شده است. پایروس با قابلیت تفکیک اطلاعات، تحلیل دقیق دادهها و ارائه خروجیهای متنوع، توانسته است جایگاه ویژهای در پروژههای ویدئومتری بهدست آورد.
از جمله خروجیهای این نرمافزار میتوان به:
-
گزارشهای Word (DOCX)
-
فایلهای اکسل (XLSX)
-
گزارشهای PDF
اشاره کرد که همگی با نیازهای سامانه دیدهبان فاضلاب سازگار هستند.
ویدئومتری؛ فناوری مؤثر در کاهش هزینه و افزایش ایمنی
ویدئومتری بهعنوان یک فناوری پرکاربرد در صنعت فاضلاب، با کاهش هزینهها و زمان موردنیاز برای بازرسی و عیبیابی، نقش مهمی در بهبود عملکرد و افزایش ایمنی شبکههای فاضلاب ایفا میکند. استفاده از ابزارهای نرمافزاری مناسب در کنار تجهیزات سختافزاری، اثربخشی این فناوری را چند برابر میکند.
سامانه دیدهبان فاضلاب و نرمافزار پایروس، نمونهای از این همافزایی میان سختافزار، نرمافزار و زیرساخت نظارتی هستند.
جمعبندی
نرمافزار ویدئومتری پایروس، محصول شرکت دانشبنیان آریا فناوران، با قابلیتهای پیشرفته و خدمات منحصربهفرد خود، به یکی از ابزارهای مؤثر و پرکاربرد در تحلیل دادههای بازرسی شبکه فاضلاب تبدیل شده است. این نرمافزار در تعامل کامل با سامانه دیدهبان فاضلاب، امکان مدیریت، تحلیل و نظارت دقیق بر دادههای ویدئومتری را فراهم میکند.
این ابزار قدرتمند به کاربران کمک میکند تا با سرعت و دقت بالا از دادههای ویدئویی خود استفاده کرده و تصمیمات دقیقتری برای بهبود عملکرد و بهرهوری شبکه فاضلاب اتخاذ نمایند.



ممنونم از سرویس دهی خوبتون قطعا رباتی که شما ساختید یکی از بهترین ربات های ایرانه
متشکریم از این که نظرتون رو اعلام کردید
باعث افتخاره نظر شما
سلام این خیلی خوبه که یک شرکت دانش بنیان ایرانی به این فناوری رسیده باشه و بتونیم توی صنعت فاضلاب کشور ازین دستگاها استفاده کنیم
[…] از سیستم هایی که در ویدیومتری شبکه های فاضلاب مورد استفاده می گیرد، سیستم CCTV است. در […]
ممنون بابت اطلاعات دقیقی که بصورت رایگان در اختیار ما گذاشتید
خواهش میکنم
برای گرفتن تعرفه کار باید تماس بگیریم ؟
سلام بله برای دریافت تعرفه ویدئومتری و ربات بازرسی فاضلاب باید با شماره 60 314 331 86+ تماس بگیرید
مقاله کاملی بود ممنون
من باشرکت شما در استان گیلان آشنا شدم و نکته مهم رضایت پیمانکاران و اداره آب و فاضلاب استان گیلان از یک شرکت دانش بنیان داخلی بود. بابت این موضوع بهتون تبریک میگم و امیدوارم همیشه موفق و سربلند باشید.
ممنون از اعتماد شما به شرکت دانش بنیان آریافناوران
شرایط خرید لیزینگ دانش بنیان رو هم این محصول داره؟
ایا نمونه های داخلی تون میتونن با نمونه خارجی رقابت کنن؟
چه مزیت هایی نسبت به نمونه خارجی دارین؟
گزارش های بازرسی طبق چه استانداردی هست؟
باعث افتخار
سلام و خدا قوت به مدیر فروش خوش برخورد مجموعه آریا فن آوران
واقعا تجربه همکاری بسیار خوبی با مجموعه شما داشتیم در خدمات پس از فروش و تعمیرات. امیدوارم بتونیم همکاری های بیشتری با مجموعه شما داشته باشیم.
[…] ربات ویدئومتری شبکه های لوله ای انتقال […]
مقاله جامع و کاملی بود تشکر
[…] اصفهان منجر به کاهش حوادث شبکه فاضلاب شده است، همچنین ویدئومتری شبکه فاضلاب در جلوگیری از حوادث مؤثر بوده است. عملیات […]
[…] دادند به طوری که سیستم روشنایی آنها در حین عملیات بازرسی شبکه فاضلاب با مشکلی مواجه شد، عملیات مذکور متوقف نگردد و ماموریت […]
[…] پیشگیرانه توسط متخصصان انجام شود.این کار در کنار ویدئومتری یکی از روش های بازرسی از مکان های غیرقابل دسترس […]
[…] ربات بازرسی لوله […]
[…] بلندی در جهت بهبود عملکرد و بهینهسازی تجهیزات ربات ویدئومتری شبکه جمعآوری فاضلاب برداشته است. این بهروزرسانیها که شامل نرمافزارها […]
سلام وخداقوت
مقاله کامل ومفیدی بود
دوتا ویژگی نرم افزار میتون خیلی از مشکلات رو حل کنه
1-خروجی های لازم برای سامانه های بومی نظارت بر شبکه فاضلاب کشور(مخصوصا سامانه دیده بان)
1-قابلیت اتصال به بانک اطلاعاتی GIS و نمایش و ثبت اطلاعات بر روی نقشه ها
واگه نرم افزار قابلیت گزارش گیری بر اساس حداقل دوتا استاندارد جهانی رو داشته باشه تکمیل میشه
سلام وخداقوت
مقاله کامل ومفیدی بود
دوتا ویژگی نرم افزار میتونه خیلی از مشکلات رو حل کنه
1-خروجی های لازم برای سامانه های بومی نظارت بر شبکه فاضلاب کشور(مخصوصا سامانه دیده بان)
1-قابلیت اتصال به بانک اطلاعاتی GIS و نمایش و ثبت اطلاعات بر روی نقشه ها
واگه نرم افزار قابلیت گزارش گیری بر اساس حداقل دوتا استاندارد جهانی رو داشته باشه تکمیل میشه
[…] توانمندی خود در بهکارگیری فناوریهای نوین و بهبود زیرساختهای آب و فاضلاب را به نمایش […]
[…] رسمی آغاز شد. رباتهای جدید در پروژههای واقعی ویدئومتری فاضلاب به کار گرفته شدند و هر پروژه تجربیات تازهای در اختیار […]
[…] ربات ویدئومتری فاضلاب در اصل یک وسیله محرکه است که به دوربین چرخان و چراغهای مخصوص مجهز شده و قادر است داخل لولههای فاضلاب حرکت کند. این ربات تصاویر زنده را مانیتور کنترل منتقل میکند و اپراتور میتواند کوچکترین ترک، انحراف، شکستگی، نشست، ورود ریشه و انسداد را مشاهده و ثبت کند. علاوه بر تصویر، بسیاری از مدلها مجهز به سیستم اندازهگیری شیب با دقت بسیار بالا هستند؛ ابزاری که برای تحلیل عملکرد هیدرولیکی شبکه ضروری است. […]
[…] دیدهبان فاضلاب بهعنوان یک رویکرد تخصصی در مدیریت دادههای ویدئومتری، بر این اصل استوار است که ارزش واقعی عملیات ویدئومتری تنها در تصویربرداری خلاصه نمیشود، بلکه در نحوه پردازش، ساماندهی و ارائه دادهها شکل میگیرد. در بسیاری از پروژهها، حجم بالای فیلمهای ویدئومتری بدون آمادهسازی اصولی، عملاً قابلیت استفاده مؤثر در تصمیمگیریهای فنی را ندارد. […]
[…] دیدهبان فاضلاب بهعنوان یک رویکرد تخصصی در مدیریت دادههای ویدئومتری، بر این اصل استوار است که ارزش واقعی عملیات ویدئومتری تنها در تصویربرداری خلاصه نمیشود، بلکه در نحوه پردازش، ساماندهی و ارائه دادهها شکل میگیرد. در بسیاری از پروژهها، حجم بالای فیلمهای ویدئومتری بدون آمادهسازی اصولی، عملاً قابلیت استفاده مؤثر در تصمیمگیریهای فنی را ندارد. […]